


















Unser umfangreiches Robotersortiment bietet neben anwendungsbezogenen Varianten wie Schweiss-, Palettier-, Lackier- und Handling-Roboter auch Modelle für Labor- und Reinraumapplikationen sowie schlüsselfertige automatisierte Schweißsysteme höchster Qualität.
Robotics Software
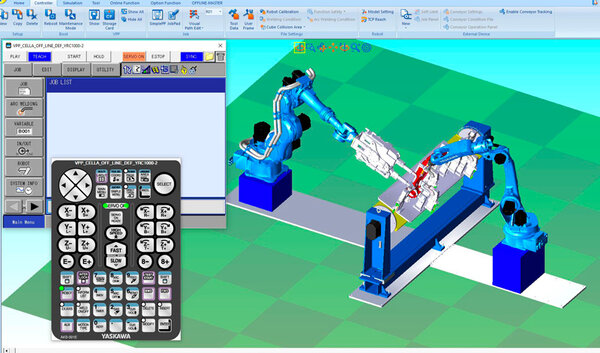
MotoSim EG-VRC
MotoSim ist ein Offline-Programmiersystem mit 3D-Simulation

Überblick
Die leistungsstarke Simulationssoftware MotoSim EG-VRC ermöglicht die Offline-Programmierung komplexer Systeme, minimiert Rüstzeiten und bietet erweiterte Steuerungsfunktionen und Simulationen der Yaskawa-Produktfamilie - wie Roboter, Portale, Bahnen und Positionierer.
MotoSim EG-VRC unterstützt zahlreiche Prozessanwendungen, wie z.B. Lichtbogenschweißen, Punktschweißen, Schneiden, Handling und Lackieren.
Funktionen im Überblick:
- Kollisionserkennung, Reichweitenanalyse und Taktzeitberechnung
- Visualisierung des realen Programmierhandgeräts ab Generation NX100
- Unterstützung der Programmiersprache INFORM
- Vollständige Simulation der Robotersoftware in PC-Umgebung
- Erstellen der Systemkonfigurationen äquivalent zur realen Steuerung
- Übertragund der Offlineprogramme ohne Kompilierung auf realen Controller
- Optimierung bestehender Roboterprogramme ohne Unterbrechung der laufenden Produktion
- Darstellung und Berechnung realer Roboterbahnen
- Diverse Mess- und Analysetools
- Einfache Integration eigener Modelle in vorhandene Yaskawa-Modellbibliothek
- Unterstützt Multi-Roboter und Multi-Controller-Simulationen
- Steuerung von Robotern und Zusatzachsen inklusive synchrone Roboterbewegung
Interesse? Registrieren Sie sich in unserem Robotics Software Download Portal!
MotoSim Plug-in WinMOD MS200
Das WinMOD MS200 Plugin bietet die Möglichkeit, virtuelle Roboter, die mit MotoSim EG-VRC programmiert wurden, in Ihr bestehendes WinMOD-System zu integrieren. So können die Roboter an verschiedene Automatisierungssysteme angebunden und in Kombination mit realen oder virtuellen Steuerungen getestet werden. Je nach Anwendungsfall können auch die Roboterperipherie (z.B. Greifer oder Fahrbahnen), der Materialfluss und die Komponentenmeldungen der Gesamtanlage simuliert und als 3D-Modell visualisiert werden. Das funktionale Verhalten von Komponenten und Prozessen wird durch Echtzeitsimulationen innerhalb der WinMOD-Umgebung oder durch die Kopplung ausgewählter Teilsysteme mit externen Simulationen (z.B. mit Process Simulate) realisiert.

Technische Daten
- Produkt-Typ
- Offline Tools
- Mobile App
- x Nein
- Betriebssystem
- MS Windows
- Mindestens erforderlicher Prozessor
- x Nein
- Mindestgröße Arbeitsspeicher
- x Nein
- Mindestgröße Festspeicher
- x Nein
Downloads
| Name | |||
| Flyer Software MotoSimEG-VRC Broschüren/Kataloge | Englisch | Broschüren/Kataloge | Englisch | |
| Flyer Software MotoSimEG-VRC Broschüren/Kataloge | Deutsch | Broschüren/Kataloge | Deutsch | |
| Flyer Software MotoSimEG-VRC Broschüren/Kataloge | Spanisch | Broschüren/Kataloge | Spanisch | |
| Flyer Plugin WinMOD DS200 Broschüren/Kataloge | Deutsch | Broschüren/Kataloge | Deutsch | |
| Flyer Plugin WinMOD DS200 Broschüren/Kataloge | Englisch | Broschüren/Kataloge | Englisch |

